凸包
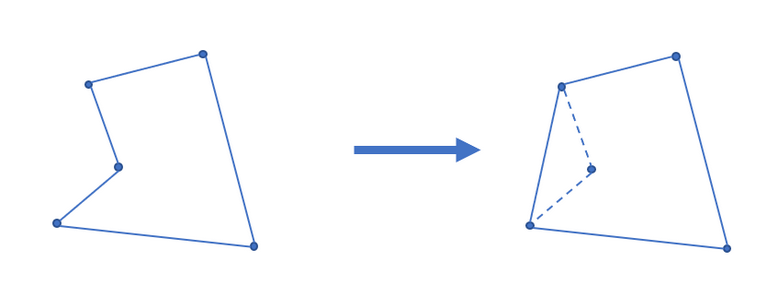
二维凸包, 凸多边形是指所有内角大小都在$[0, \pi]$范围内的简单多边形。在平面上能包含所有给定点的最小凸多边形叫做凸包。
Andrew算法
$\quad\quad$首先将点集按照x坐标(第一关键字),y坐标进行升序排列。显然排序后最小的元素和最大的元素一定在凸包上。他们之间的部分可以分成上下两条链分别求解。求下链时只要从小到大遍历排序后的点列,求上链从大到小遍历即可。
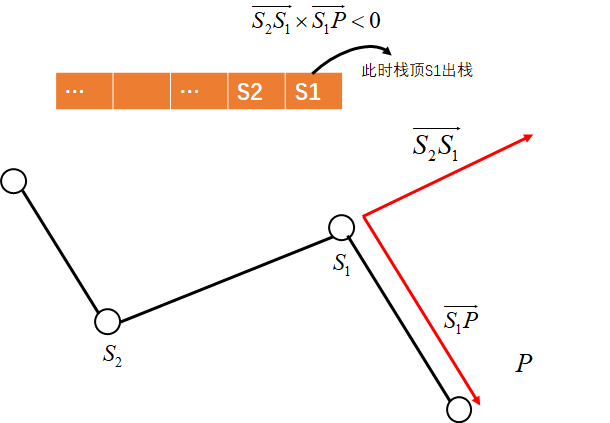
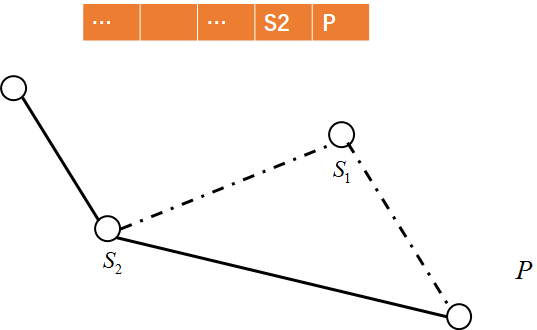
$\quad\quad$在凸包上,我们从一个点出发逆时针走,轨迹总是左拐的,如果出现右拐,则说明该段不在凸包上。采用栈来记录轨迹上已经走过的点,如果即将入栈的点$P$和栈顶点$S_1$构成的向量方向相较$S_2, S_1$构成向量的方向向右旋转,即叉积$\vec{S_2S_1} \times\vec{S_1P} < 0$,则弹出栈顶,直到$\vec{S_2S_1} \times\vec{S_1P} \geq 0$或栈内仅包含一个元素。
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
| struct Point {
int x, y;
Point(int _x, int _y) : x(_x), y(_y) {}
bool operator < (const Point& rhs) const {
return x == rhs.x ? y < rhs.y : x < rhs.x;
}
Point operator - (const Point& rhs) {
Point ret(0, 0);
ret.x = x - rhs.x;
ret.y = y - rhs.y;
return ret;
}
int operator ^ (const Point& rhs) {
return x * rhs.y - y * rhs.x;
}
};
class Solution {
public:
vector<vector<int>> outerTrees(vector<vector<int>>& points) {
vector<Point> arr;
int n = points.size();
for (int i = 0; i < n; ++i) {
arr.push_back({points[i][0], points[i][1]});
}
sort(arr.begin(), arr.end());
int tp = 0;
vector<bool> used(n, 0);
vector<int> st(n + 5);
for (int i = 0; i < n; ++i) {
while (tp >= 2 && ((arr[st[tp]] - arr[st[tp - 1]]) ^ (arr[i] - arr[st[tp]])) < 0) {
used[st[tp--]] = false;
}
st[++tp] = i;
used[i] = true;
}
used[0] = false;
for (int i = n - 1; i >= 0; --i) {
if (used[i]) continue;
while (tp >= 2 && ((arr[st[tp]] - arr[st[tp - 1]]) ^ (arr[i] - arr[st[tp]])) < 0) {
used[st[tp--]] = false;
}
st[++tp] = i;
used[i] = true;
}
vector<vector<int>> ret;
for (int i = 1; i < tp; ++i) {
ret.push_back({arr[st[i]].x, arr[st[i]].y});
}
return ret;
}
};
|
复杂度分析
- 时间复杂度,排序$O(n\log n)$,上下链求解$O(2n)$
- 空间复杂度,栈的最大深度为O(n)